Plan and Review Missions¶
Use the Mission workspace to open the mission list, start a new mission definition, and review the visible actions for pushing or starting live missions.
Navigation: Menu > Mission
Before You Start¶
Connect the target asset before using live mission actions.
Confirm the aircraft is safe before using Push or Start.
Steps¶
Open Mission to review the current mission list and pushed mission state.
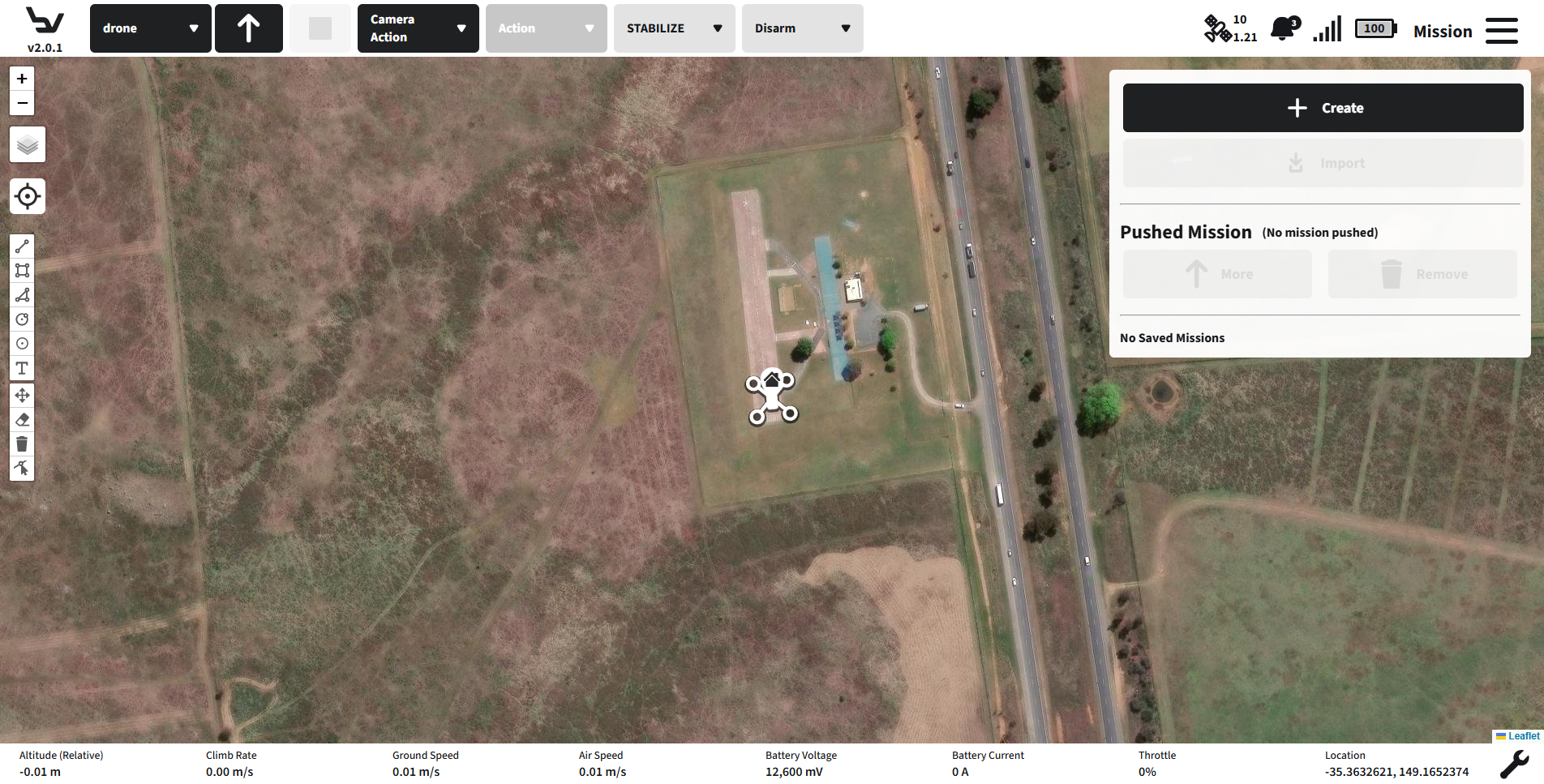
Fig. 103 Step 1: Mission list view¶
Review the mission panel. The main mission screen exposes Create, Import, and the current Pushed Mission state before you open a mission editor.
Fig. 104 Step 2: Mission action bar¶
Click Create to open the mission details view.
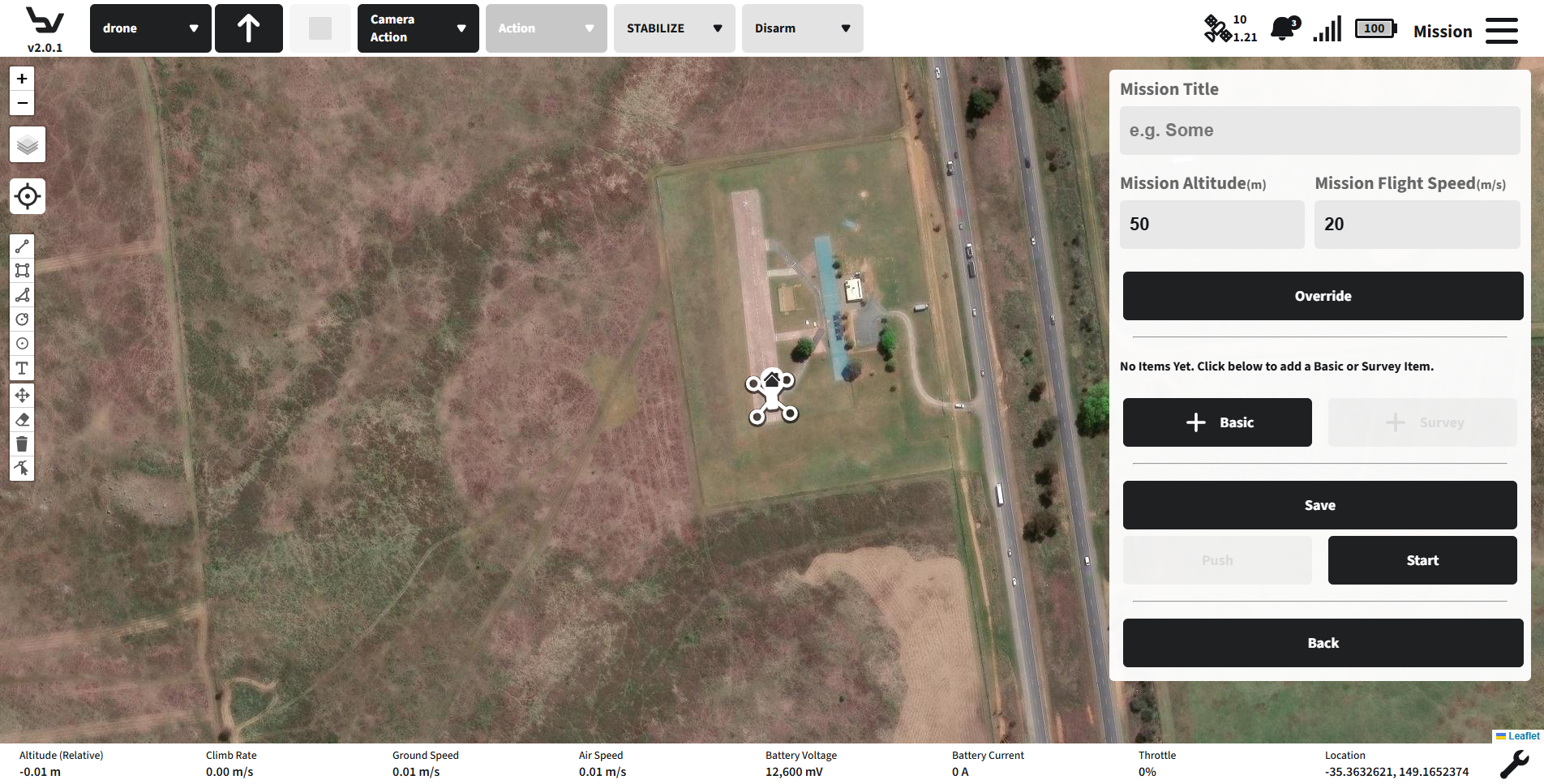
Fig. 105 Step 3: Mission details opened from Create¶
Fill in Mission Title, Mission Altitude, and Mission Flight Speed before adding mission items.
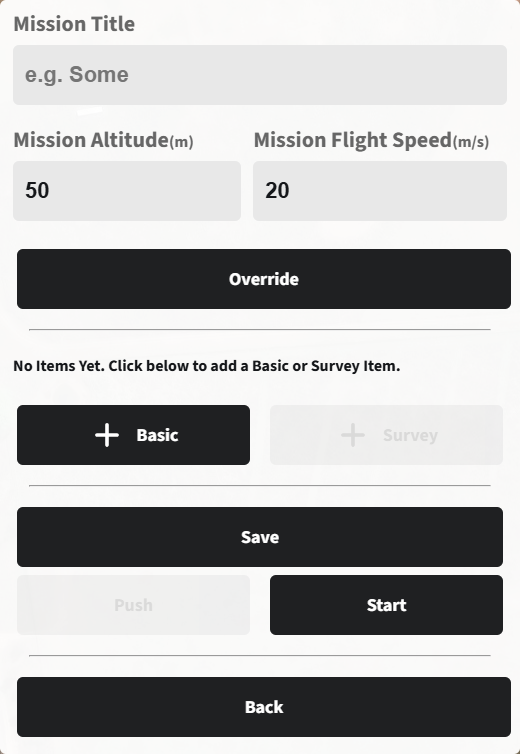
Fig. 106 Step 4: Mission details editor¶
Use Basic or Survey to add mission content to the new mission.
Fig. 107 Step 5: Add mission items¶
Review the Save, Push, and Start controls in the mission editor. Push remains unavailable until the mission contains the required items and the current operating state allows it.
Fig. 108 Step 6: Push and Start controls¶
Caution
Push and Start affect the live mission state of the connected aircraft. Treat both actions as operational controls, not preview-only actions.
Expected Result¶
You can reach the mission workspace, create a new mission draft, and identify the controls used to save, push, or start mission execution.
Troubleshooting¶
If Create opens an empty mission editor, that is expected for a new mission draft.
If Push stays unavailable, add the required mission items first and confirm an active asset is connected.
If no saved missions appear, create or import a mission before expecting mission history in the list.